O Projeto Pick and Place
O Projeto Pick and Place ou em português, apanha e coloca, foi desenvolvido durante a minha Licenciatura em Engenharia Eletrotécnica e de Computadores, no ano letivo de 2019/2020, para a disciplina de Laboratório de Sistemas.
O principal objetivo era aprofundar conhecimentos em microcontroladores (como o Arduino, para quem não está familiarizado), explorar conceitos de eletrónica avançada e ainda integrar competências no desenvolvimento de websites, uma vez que o relatório final foi apresentado nesse formato.
Estrutura e funcionamento
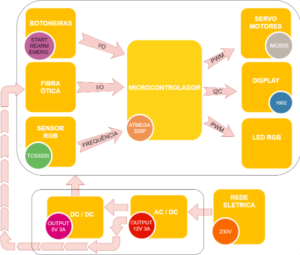
O coração do protótipo era o microcontrolador Atmega 328p, que gerenciava entradas e saídas essenciais para o funcionamento do sistema. O braço robótico foi adquirido numa loja de eletrónica, sendo que fazia parte de um kit de robótica. Entre os principais componentes do projeto, destacam-se:
Sensores:
Um sensor RGB TCS3200 para deteção de cores.
Uma fibra ótica que identificava a presença de peças na calha.
Botões para controle, como Start, Emergência e Reset.
Atuadores:
Quatro servomotores responsáveis pelo movimento do braço robótico.
Um display 1602 para exibição em tempo real das operações.
Um LED RGB que indicava a cor detetada pelo sensor.
Fonte de alimentação:
Um circuito AC/DC que convertia os 230V para 12V e para 5V, fornecendo energia para todos os componentes do protótipo.
O Projeto Pick and Place consistia num braço robótico programado para buscar um M&M, transportá-lo até a zona de inspeção, onde um sensor de cor identificava sua tonalidade. Com base nessa informação, o braço robótico colocava o M&M no copo correspondente à sua cor.
Além disso, o projeto incorporou mecanismos de segurança, como um botão de emergência que interrompia imediatamente qualquer operação. No vídeo abaixo, podes conferir o resultado final do projeto.
Resultados e desafios
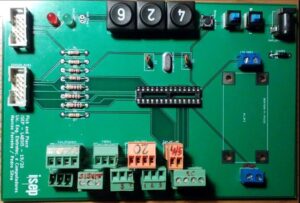
O protótipo foi concluído com uma Placa de Circuito Impresso e um sistema totalmente operacional. De realçar que foi com este projeto que iniciei o desenvolvimento deste tipo de Placas.
Apesar disso, eu e o meu colega de grupo, encontramos dificuldades na calibração do sensor RGB, o que impediu a separação precisa de peças por cor. Ainda assim, outros subsistemas, como servomotores, fibra ótica e display, funcionaram perfeitamente, demonstrando a viabilidade do projeto.
Para o futuro, as melhorias previstas seriam a implementação de um joystick para controlo manual, uma câmara para reconhecimento de forma e um sistema de monitoramento remoto via Wi-Fi, aplicando o microcontrolador ESP8266.
O relatório final, foi feito em formato website, com suporte do bootstrapstudio que é muito semelhante ao desenvolvimento web em wordpress. Pode parecer estranho, mas apenas instalei a aplicação no computador, escolhi um template e comecei a detalhar o projeto. No fim exportei o site em ficheiros .html e enviei para avaliação.
Abaixo deixo-te um vídeo feito durante os testes, assim como a Placa de Circuito Impresso no final e a Arquitetura do Sistema para os mais curiosos. (Nota: para observar melhor as fotos, podes clicar em cima com o botão do rato direito e escolher “Abrir num novo Separador”)